

Robotica Industrial ABB IRB140
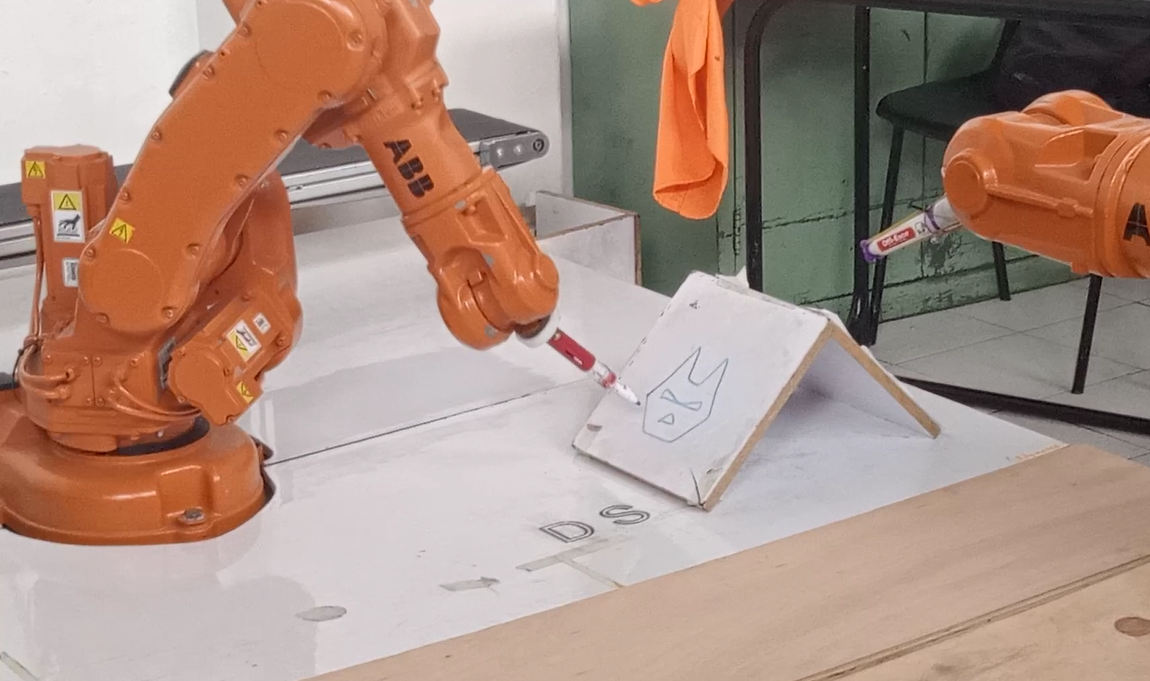
Control de robot industrial ABB IRB 140 para ejecución de rutina implementando cinemática directa e indirecta, a partir de codigo RAPID, se implementan entradas y salidas digitales para confirmar ordenes y retroalimentar el estado del robot. 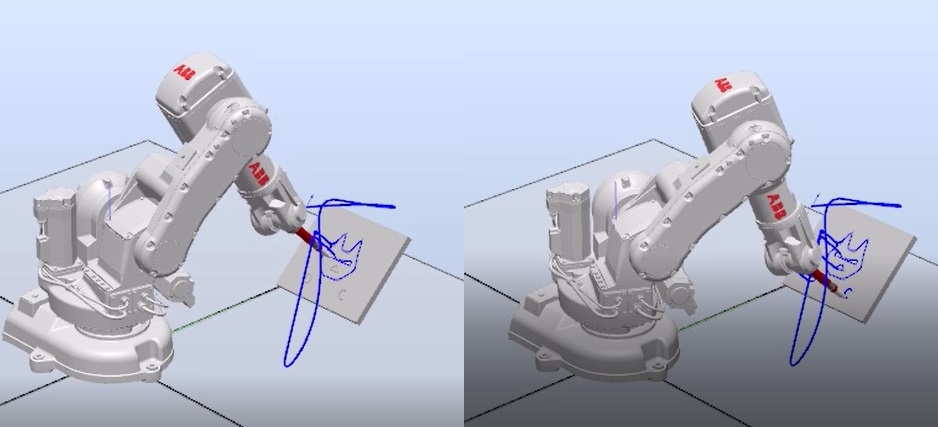

GitHub - Danacruzrui/ABB_IRB140_Entradas-Salidas: Laboratorio 3 - Robótica Industrial 2, Entradas y Salidas, desarrollado por Daniel Cruz y Cristhian Pulido
Laboratorio 3 - Robótica Industrial 2, Entradas y Salidas, desarrollado por Daniel Cruz y Cristhian Pulido - GitHub - Danacruzrui/ABB_IRB140_Entradas-Salidas: Laboratorio 3 - Robótica Industrial 2,...
Más artículos de Daniel Alexander Cruz Ruiz
Ver publicaciones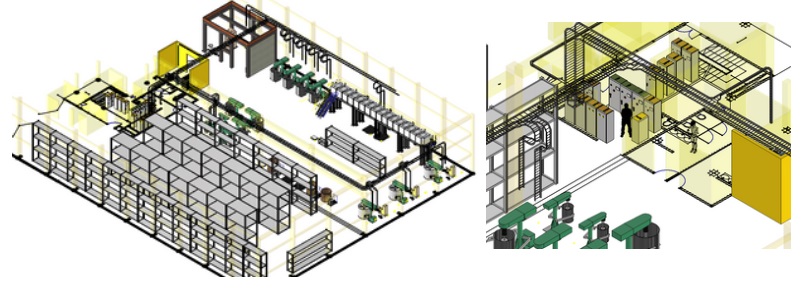
Planeación e ingeniería a detalle de planta industrial
Daniel Alexander Cruz Ruiz · Ruteo de redes eléctricas (potencia y control), mediante el despliegue de bandejas porta cable y red de tubería. Dimensionamiento y ubicación de equipos según la operación en planta, el flujo de trabajo y las líneas de producción. · Integración de las diversas especialidades en e ...

Adaptación remo ergonómico- Rehabilitación miembros inferiores
Daniel Alexander Cruz Ruiz · Adaptación e instrumentación de máquina de remo, con el objetivo de implementarla como un dispositivo de rehabilitación para pacientes con lesión medular menor a T7 mediante la asistencia controlada del movimiento de flexión y extensión propio del ejercicio de remo. · GitHub - ...
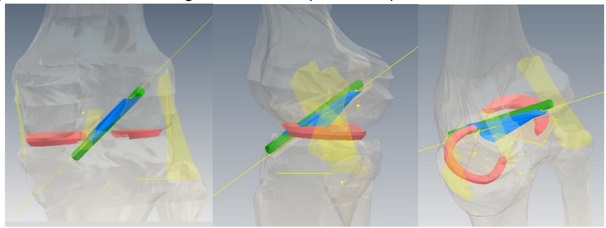
MODELO BIOMECÁNICO DE RODILLA- RECONSTRUCCIÓN LIGAMENTO CRUZADO ANTERIOR
Daniel Alexander Cruz Ruiz · Se obtiene un modelo 3D de la articulación de la rodilla, a partir de tomografías, en el cual se identifica la ubicación natural del ligamento, se realiza la simulación del movimiento de marcha para determinar los ángulos de flexión-extensión de mayor exigencia y de esta manera p ...
Comentarios